基础功能编程
基本功能使用
OriginCar Pro 配备的镜像中安装了ROS2 humble / TogetheROS,以及自带了关于OriginCar Pro的底层驱动功能包和相机驱动功能包,下面介绍使用方法。
底盘驱动
利用远程连接中的任意一个方式登入到OriginCar Pro系统中,输入以下命令
按键控制
在底盘驱动启动的基础上启动按键控制,此时OriginCar Pro将会跟随指令移动
注:由于是阿克曼结构,OriginCar Pro无法在没有线速度情况下进行左右移动人体识别
人体识别在OriginCar Pro中作为相机驱动的Demo,使用者可以运行人体识别功能验证相机同时参考实现类似视觉功能。
注:此命令输出的图像将会展示在网页端,将OriginCar Pro与PC机连接在同一个局域网内,在浏览器中输入OriginCar Pro IP地址和端口号8000即可进入对应网页。如下图
键盘控制
OriginCar Pro中启动底盘
此时在数字环境中可以按下键盘中r键即可启动上位机控制
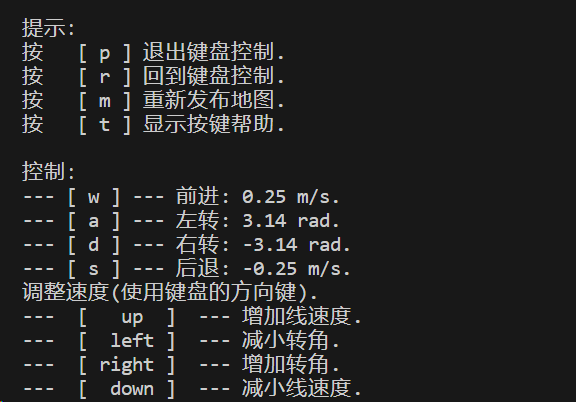
按下WSAD便可以操作OriginCar Pro移动。