快速上手
完成OriginCar的联网配置之后,接下来就可以启动OriginCar啦!
上电启动
(1)打开电源总开关,可以观察小车灯带和板卡上的指示灯点亮
远程连接
(1)启动MobaXterm,远程登录OriginCar
(2)输入用户名和密码:root(用户名),root(密码)
(3)远程登录成功

示例运行(键盘控制)
我们先来运行机器人遥控的示例,熟悉机器人的基本操作。
SSH连接成功后,输入以下指令,即可进行遥控操作OriginCar:
另外再次开启一个终端,输入以下命令,开启键盘控制节点
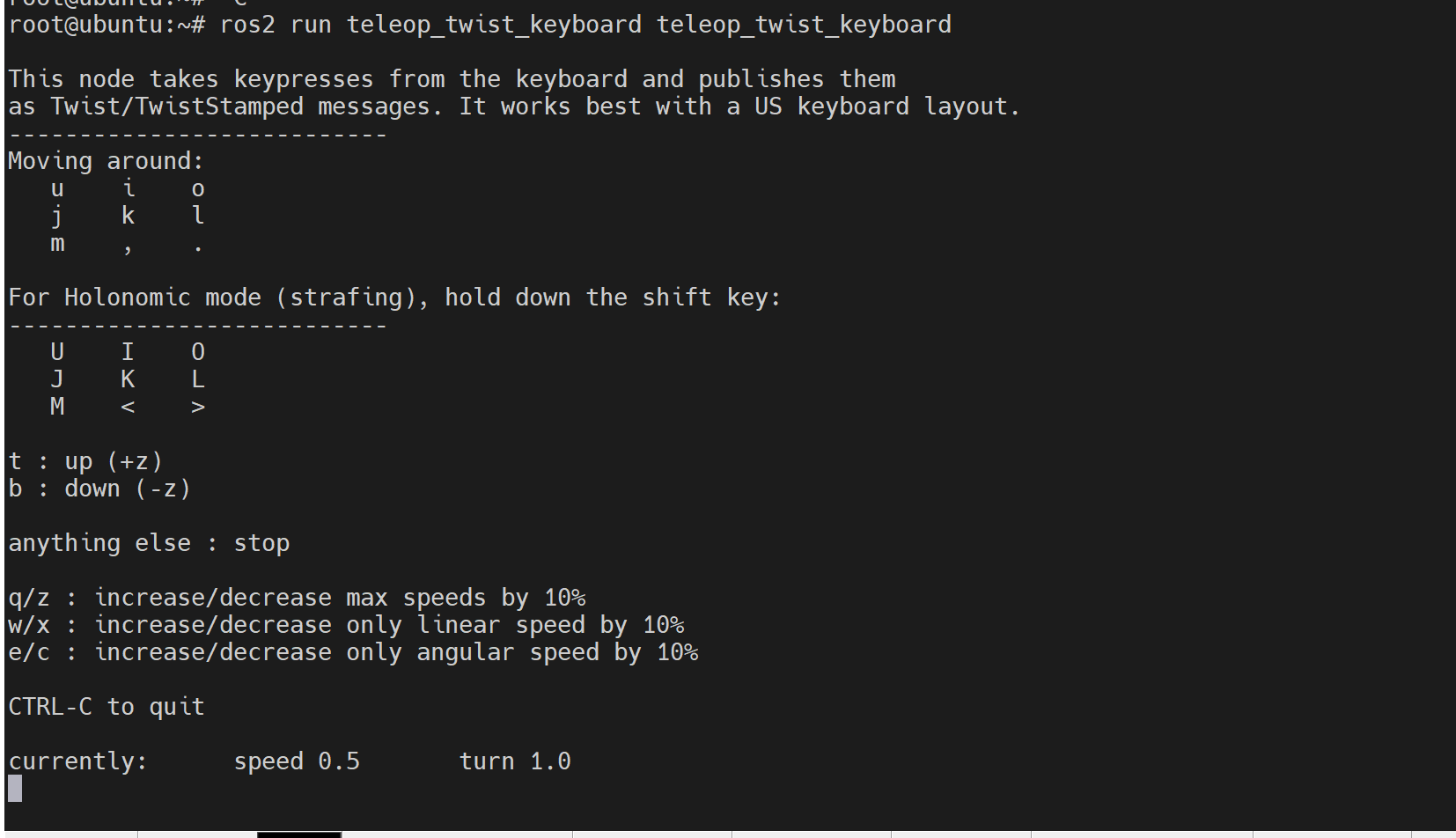
注:由于是阿克曼结构,OriginCar无法在没有线速度情况下进行左右移动
断电关机
如果需要关闭机器人,可以在终端中输入如下指令,关闭软件系统:
稍等5秒左右,就可以关闭机器人控制器上的电源开关,机器人关机完成。
Attention
直接关闭电源开关也可以断电关机,但有可能损坏软件系统正在读写的文件,导致系统出现意外问题。
至此,我们已经初步上手OriginCar,可以参考“基础使用”和“应用功能”继续深入开发。
